Dabam
New member
Hello - I have a Hunter 310 with a well functioning Autopilot (Raymarine ST4000(+?)) - not 100% sure if it's a (+) or not;
When going from Standby to Auto, the boat stays perfect on course;
When giving it a way point from the Simrad Go9, it goes straight to that waypoint and asks for cancellation once the waypoint is reached.
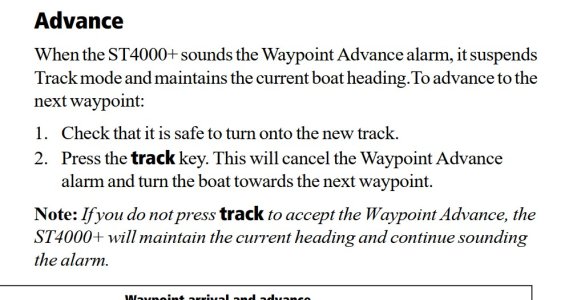
When setting up a route on the Simrad, then sending the route to "active" - each waypoint is being transferred to the ST4000 right on time, acknowledged there and "activated"...
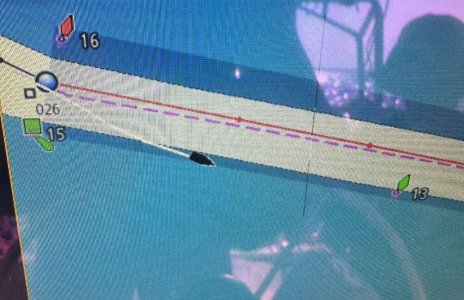
The problem I have is that every time the "new" waypoint is changing course, the autopilot is not reacting for a long long time, it way overshoots the last waypoint until it finally starts to put some course correction in for the new waypoint.
I have played with the arrival circle and the max off track width (not sure the correct terms as unit is not in front of me) but nothing has helped so far....
Any help is highly appreciated...
When going from Standby to Auto, the boat stays perfect on course;
When giving it a way point from the Simrad Go9, it goes straight to that waypoint and asks for cancellation once the waypoint is reached.
When setting up a route on the Simrad, then sending the route to "active" - each waypoint is being transferred to the ST4000 right on time, acknowledged there and "activated"...
The problem I have is that every time the "new" waypoint is changing course, the autopilot is not reacting for a long long time, it way overshoots the last waypoint until it finally starts to put some course correction in for the new waypoint.
I have played with the arrival circle and the max off track width (not sure the correct terms as unit is not in front of me) but nothing has helped so far....
Any help is highly appreciated...